一、實訓目的:實現電機正反轉運行,速度模式下可調速。
二、實訓設備:
1. 編程軟件:博途TIA Portal V14
2. 西門子PLC型號: S7-1200→CPU 1215C DC→6ES7 215-1AG40-0XB0
840dsl連接step7、3. RS485型號:CB 1241 6ES7 241-1CH30-1XB0
4. 驅動器型號:IS620PS2R8I-IAB
5. 伺服電機型號:ISMH1-40B30CB
1. 設備連接:
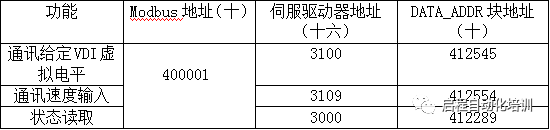
通訊協議采用RTU協議,Modbus標準協議。
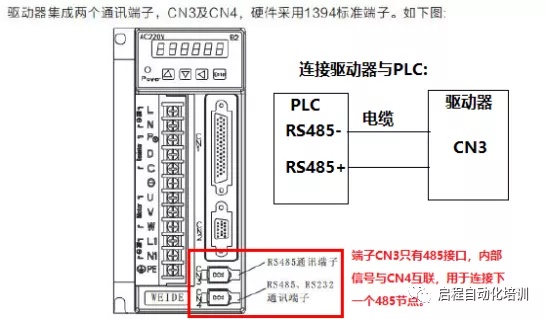
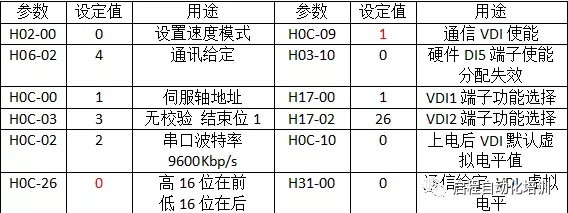
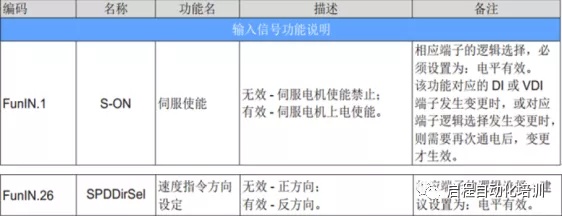
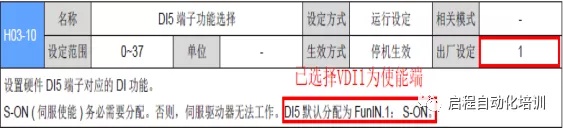
西門子1200與匯川伺服pn通訊。2.驅動器參數設置:

3.西門子程序編寫步驟:
s7 1200控制2個伺服實例,
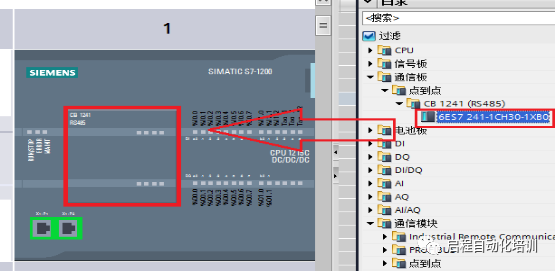
1)添加設備CB 1241(RS485):點擊目錄中的“通信板”選擇“點到點”>選擇“CB 1241(RS485)”>選擇“6ES7 241-1CH30-1XB0”。
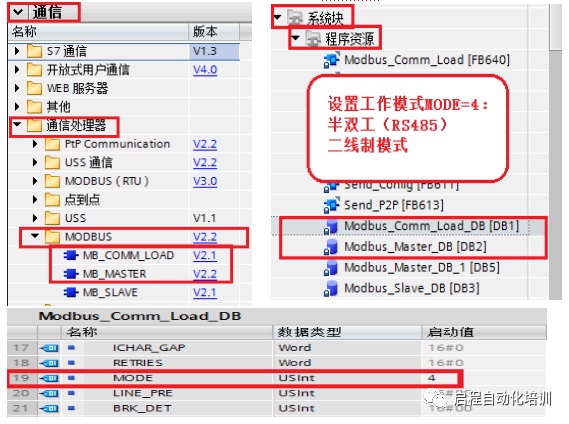
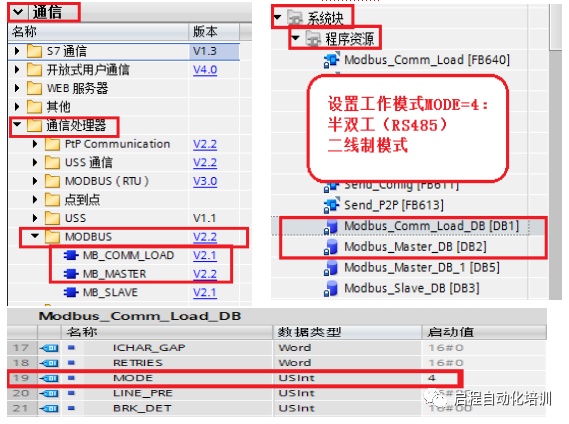
2)打開主程序界面,點擊“通信”>點擊“通信處理器”>點擊“MODBUS”添加Modbus_Comm_Load_DB塊、Modbus_Master_DB塊>點擊“系統塊”>雙擊“Modbus_Comm_Load_DB[DB1]”和“Modbus_Master_DB[DB2]”>設置工作模式MODE=4,使用RTU通訊(標準的Modbus協議)
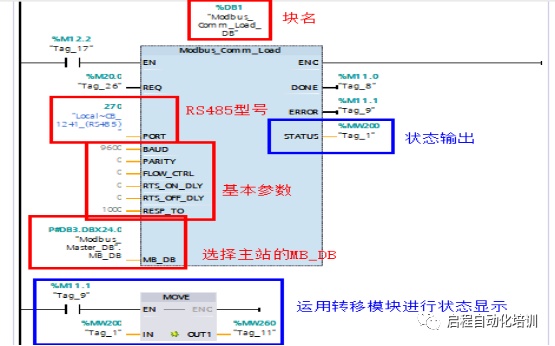
3)使用Modbus_Comm_Load_DB1塊進行通訊設置:
西門子modbus塊空閑?狀態顯示可以使用MOV指令塊將IN 輸入值(%MW200)傳送給 OUT1 輸出值(%MW260)
4)使用Modbus_Master_DB塊進行讀寫數據,MODE=0為讀狀態,MODE=1為寫狀態;添加數據塊Static:點擊“添加新塊 ”,彈出“添加新塊”窗口>點擊數據塊,選擇“全局”>點擊確定>雙擊“數據塊_1[DB4]”>點擊“數據類型”選擇“Array[0..1] of Bool”,點擊右鍵,更改為“Array[0..100] of Word”,同理建立Static_3和Static_2。
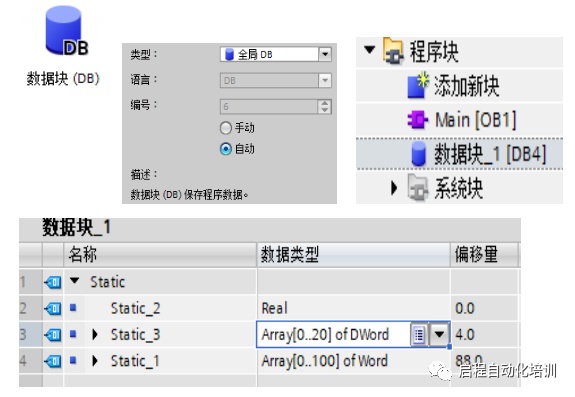
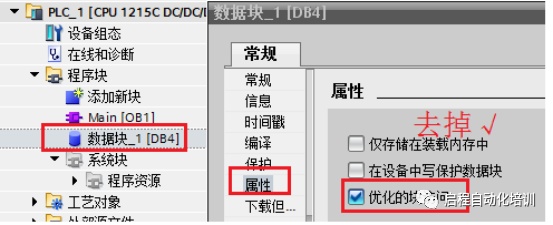
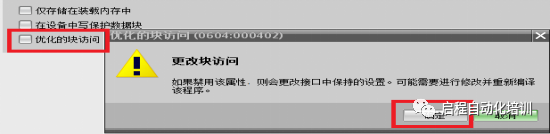
5)點擊“數據塊_1[DB4]”>更改屬性:不需要“優化的塊訪問”,點擊確定
modbus規約、
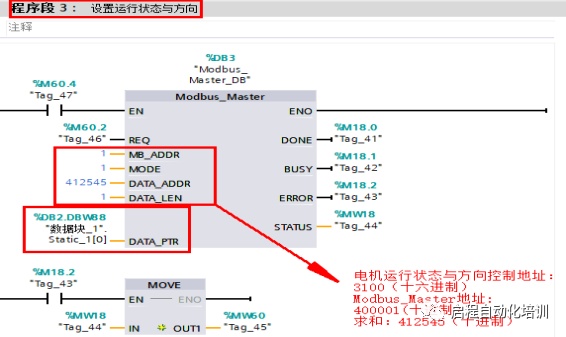
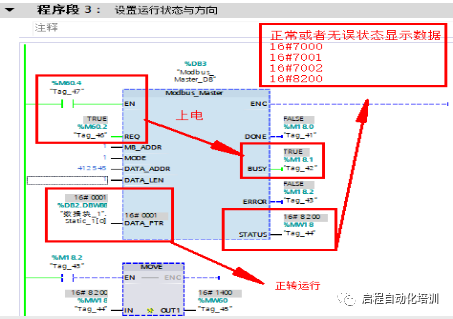
6)主站DB3塊“DATA_PTR”選擇“數據塊_1Static_1[0]”,使用主站DB3塊(可復制)設定運行狀態與方向的參數,如下圖所示:
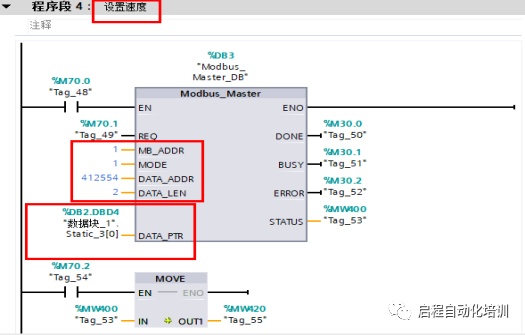
7)主站DB3塊“DATA_PTR”選擇“數據塊_1Static_3[0]”,使用主站DB3塊設定速度控制的參數,如下圖所示:
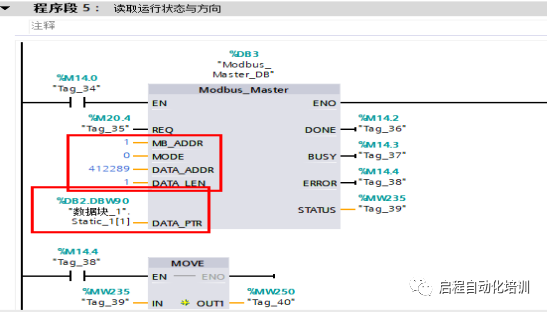
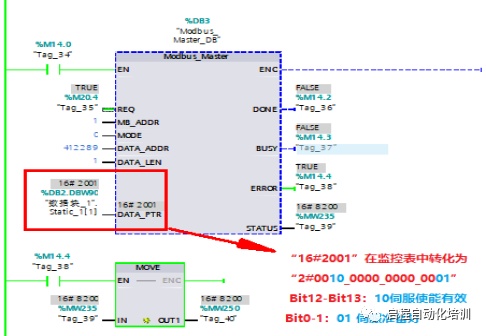
8)主站DB3塊“DATA_PTR”選擇“數據塊_1Static_1[1]”,使用主站DB3塊設定讀取“電機運行狀態與方向”的參數,如下圖所示:
modbus rtu tcp,
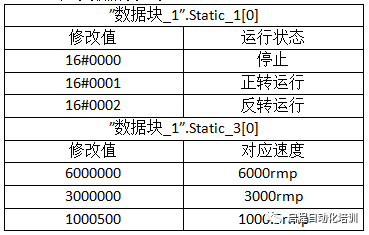
9)程序編寫完畢,點擊“編譯”>確認無誤后,點擊“下載”>下載完成,點擊“轉至在線”進入在線模式>點擊“監控”,進入監控模式>點擊左側菜單“監控與強制表”建立“監控表1”>設置“”數據塊_1”.Static_1[0]”修改值為”16#0001”(正轉運行),設置“”數據塊_3”.Static_3[0]”修改值為”5000000”(5000rmp)>點擊
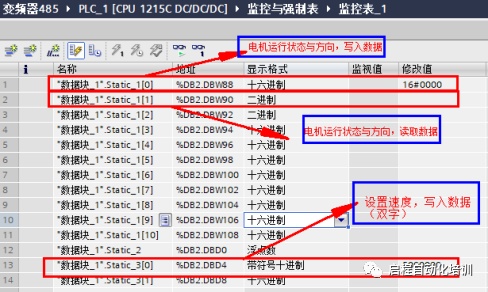
10)監控表數據設置表:
Modbus poll,
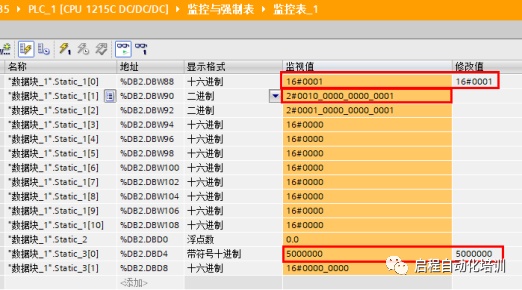
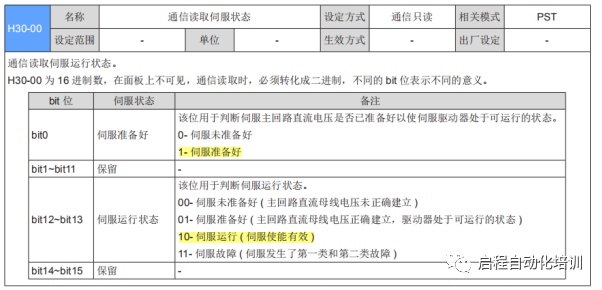
11)以下是狀態讀取Modbus_Master塊,”數據塊_1”.Static_1[1]顯示十六進制“16#2001”,在監控表中轉化為二進制“2#0010_0000_0000_0001”,位Bit0:1,伺服準備好;位Bit13:1,伺服使能有效。
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态






![BZOJ 4518: [Sdoi2016]征途 [斜率优化DP]](/upload/rand_pic/2-280.jpg)