女主宣言
2018年年初,360推出了扫地机器人。这款机器人应用了SLAM技术。SLAM技术可以对未知环境自动建立地图,并为智能设备导航。这一技术广泛地应用于各种可移动的智能设备。不论是自动驾驶汽车、机器人、VR/AR设备都离不开SLAM技术。本次360人工智能研究院副院长谭平教授将结合扫地机器人这一应用,简要介绍扫地机器人在规划导航(SLAM)方面的技术原理。
PS:丰富的一线技术、多元化的表现形式,尽在“HULK一线技术杂谈”,点关注哦!

18年初,360正式推出了智能业务线最新产品——360扫地机器人

360扫地机器人搭载了人工智能黑科技,采用激光SLAM的规划式,高效率、无漏扫;扫拖一体设计;独家指定禁区功能——扫地机中的战斗机,欧耶!

那么问题来了
什么是SLAM?

哪些人在研究SLAM?
这些应用离我们互联网公司有点遥远,那么我们近一点的,就是这两年比较火的AR/VR

为什么用AR要解决SLAM 的问题?
图片为微软的HoloLens眼镜。
假想我现在带的是一副AR眼镜,那么带了AR眼镜以后,我的面前就应该能出现一个虚拟的人物站在这,从不同的角度可以看到他不同的样子。
比如,我现在正对着笔记本,那我就要看到笔记本的正面的屏幕,朝下要看到键盘,走到背面就要看到笔记本的背面。
这些要怎么实现呢?如果有一个SLAM系统的话,这一切就就都可以做到。
我站在笔记本前面时,SLAM系统就定位出我的位置,从而相应地在眼镜片上投射电脑屏幕的图像。所以要做好AR眼镜,SLAM是里面最关键的一个问题。
另一个和今天的话题直接相关的就是机器人。研究机器人的人都很关注SLAM。
下面为大家介绍一下SLAM的概念。
SLAM的两种形态
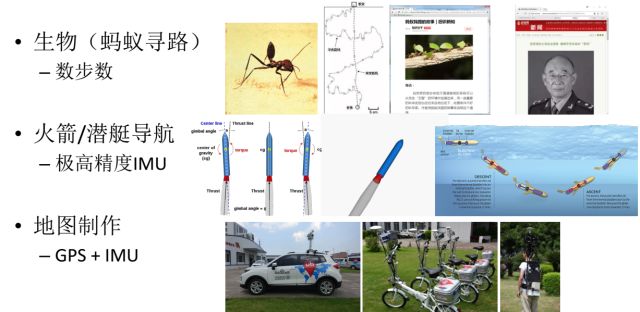
Sparse SLAM
– 地图中只有少量的环境点
– 如:火箭/潜艇导航、地图绘制
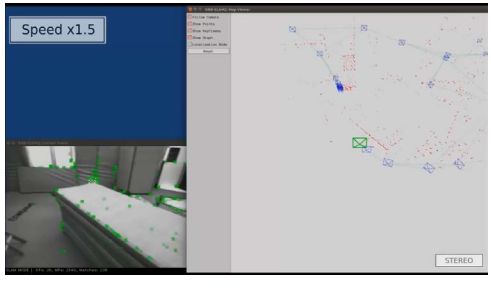
上图是一个用相机做Sparse SLAM的例子。如图有一些绿色的点,在做Sparse SLAM时,只能把这些绿色的点的三维坐标恢复出来,最终的地图里面只有这些绿色的点,其他绝大多数的像素都被丢掉了。
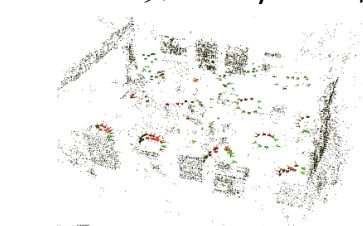
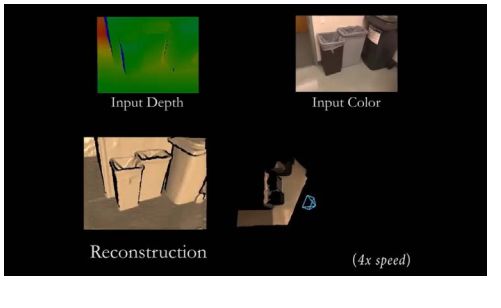
Dense SLAM
– 地图中有完整的环境信息
– 如: AR/VR、 机器人

对比来说,Dense SLAM就会得到一张比较Dense的图,比如上图是一个房间,右上角那里,床铺的细节都可以看得到。
机器人的基本问题
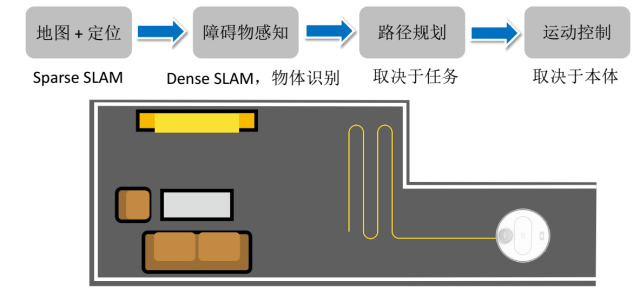
扫地机器人方案
1扫地机方案一:醉鬼走路
代表产品
工作方式
第一代扫地机器人的基本技术思想很简单,机器人沿任意方向直行,碰撞后按随机方向折返。理论上讲,给足够长的时间,机器人可以清扫房间的每一个角落。但这只是理论上。实际情况是,机器人往往会被卡在狭小的区域,反复碰撞,怎么也不能摆脱困境。

如图,这个机器人就被卡在床和墙壁之间的缝里,红色部分就是无法扫到的区域。
这让我想起大学时学《随机过程》的情景。为了说明随机游走的这种困境,老师用交大人工湖在图书馆前的一个狭长部分为例。每当湖面的落叶飘到那个狭窄的“盲肠”就很难再漂出来,于是“盲肠”成了天然的垃圾收集器,清洁工只需要打扫那个“盲肠”就能保持整个湖面干净。据说高明的建筑师都会这样设计人工湖。只是在扫地这事上,机器人成了漂浮的落叶,家里的每个拐角都是危险的“盲肠”。
2
扫地机方案二:盲人摸象(ESLAM)
代表产品

工作方式
机器人通过轮速记和IMU来记录自己的运行轨迹。
●轮速记可以记录轮子转了多少圈。
最常见的轮速记就是用在出租车上,出租车打表就是用轮速记,根据轮子转了多少圈计算行驶路程来计费。所以据说有司机把车轮换成小一点的轮子,这样就可以多挣大家的钱。
扫地机器人通过轮速记记录自己转了几圈,乘以周长,就可以计算自己走了多远。
●IMU记录转弯的方向。
行走距离+转弯方向就可以知道自己的行走轨迹。
这个方案就像一个生活经验丰富的盲人,光靠记转弯、数步数也能弄清楚自己的行走轨迹一般。有了这样的“航迹推算”,机器就可以按预设的、覆盖全平面的轨迹行走,撞到障碍物就标出并折返。这个方案是规划式的最初级形态——建图基本靠走,避障基本靠撞。

这个方案的问题是机器只能获得对环境的粗糙感知。家庭场景常有狭窄通道,比如床和墙之间的走道。机器很可能在通道入口发生碰撞(设想一位不熟悉环境的盲人试图进入该通道的情形),然后就会折返,留下一整条通道没有打扫。
如图,墙的边界线和床的外围用虚线表示,代表这些机器人是看不到的。红色部分就是机器人扫不到的区域。
另一个典型困境是密集障碍物,比如环绕餐桌放置的椅子,机器人很难在那里顺利通行。具体的原因是,每次碰撞轮子都会有不同程度的打滑,导致轮速记不准,而频繁的旋转又会导致陀螺仪累积误差剧增。机器人就像是一位误入树林的盲人,被打滑、碰撞弄得晕头转向,很难脱身。
3
扫地机方案三:眯缝眼(LSLAM)
代表产品

工作方式
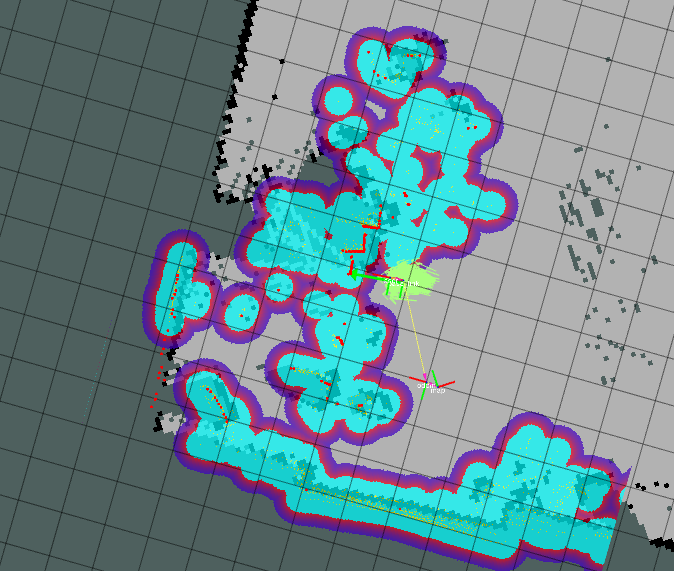
这一代产品是近几年出现的,在智能化程度、用户体验上提升很大,激活了用户的购买欲,并迅速抢走第二代产品的市场。第三代扫地机器人开始配备能直接观测环境的传感器,并根据这个传感器不同,细分为激光雷达方案、摄像头方案。激光雷达安装在机器人顶部(突起部分),描绘一副离地面约9厘米高的平面地图。但单线激光雷达就像一个“眯缝眼”,这个平面外的东西一概看不见。
如图,墙角线用实线表示,因为这些是机器人能看到的。而鞋的边框用虚线表示,代表机器人看不到,因为鞋子太低了,机器人能识别的是一副离地面约9厘米高的平面地图,这个平面外的东西一概看不见,导致机器人会推着鞋子跑。这其实是这种方案目前面临的最大挑战。
4
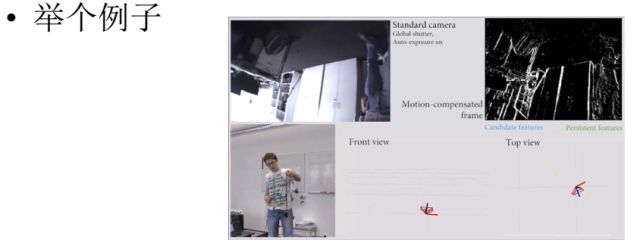
扫地机方案四:视觉方案(VSLAM)
代表产品

工作方式
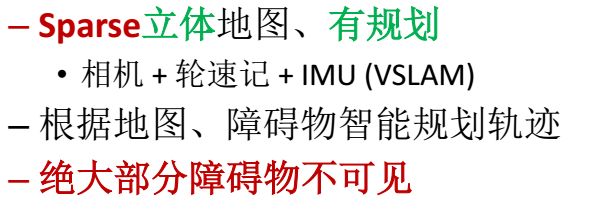
摄像头拍摄照片,并用这些照片来建立环境地图。但受限于算法和计算能力,摄像头只能在所谓“特征点”上解算出三维信息用于建立地图。而这些特征点是稀疏地分布在图像中,其数目并不多。

摄像头的好处是视野更大,有机会识别地板上一些需要规避的东西,如宠物粪便、鞋子。单线激光看不到低矮的东西,并可能导致灾难性的后果——扫地机均匀地把宠物粪便涂满屋子。但摄像头的缺点是无法精准定位障碍物。如我前面所说,由于是Sparse 地图,摄像头建立的地图只包含“特征点”。而很多障碍物上很可能一个特征点都没有。于是在障碍物密集区域或是狭窄通道处,摄像头方案都会明显弱于激光雷达。特别是在弱光下摄像头方案几乎会退化到第二代的“盲人摸象”式。
我们实测了Dyson和iRobot几款明星级摄像头方案产品,验证了这个技术判断。最终我们选定用激光方案来做360扫地机器人,因为有密集餐桌椅的家庭远多于有随地大小便宠物的家庭。
方案一vs方案二VS方案三
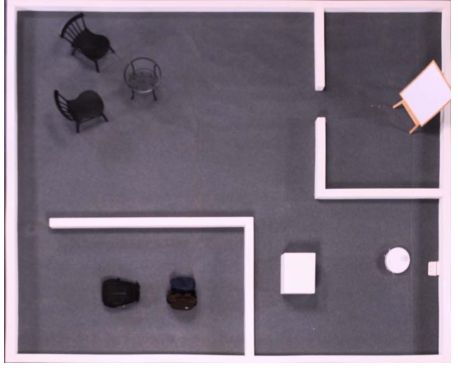
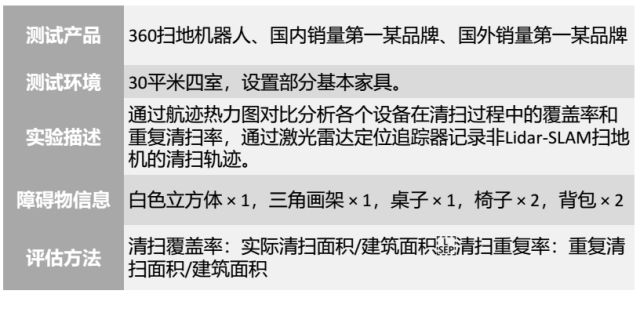
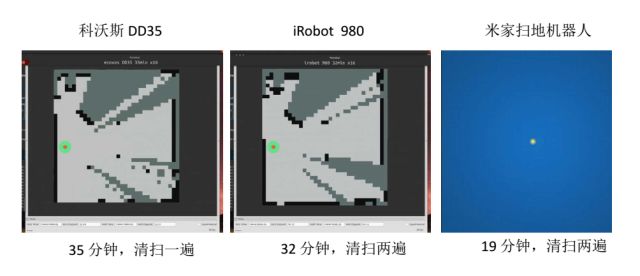
测试场景
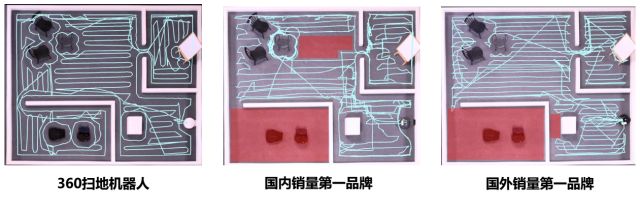
清扫效果对比
躲避障碍物

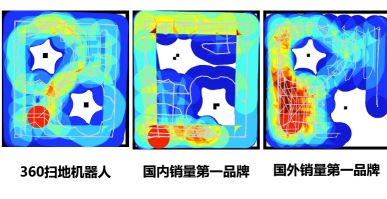
穿行狭缝

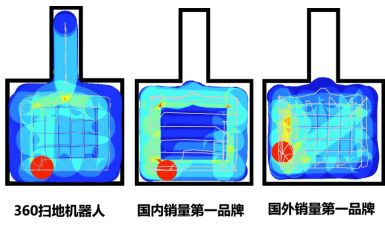
测试结论
三大类方案
– ESLAM (盲人摸象) 科沃斯DD35、浦桑尼克790
– LSLAM (眯缝眼) 小米扫地机、 360 S6
– VSLAM iRobot 980、科沃斯DJ35
结论
– ESLAM易漏扫、扫得慢
– LSLAM 在窄缝、障碍物密集场景最优
– VSLAM 的潜力还没有被充分开发
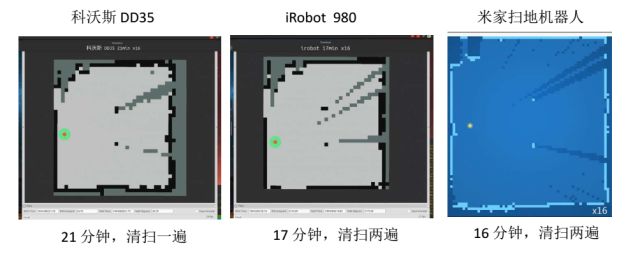
更多测评实验
• 测试区域: 9平米会议室
• 三个场景,分别为简单、中等、较复杂
• 自制设备记录各家扫地机的清扫轨迹
• 对比分析清扫效率

评测结果—简单场景
• 简单场景下VSLAM和激光SLAM效果接近
• ESLAM没有建图功能,路径规划较差
评测结果—中等场景
• 场景中有障碍物时,激光的优势开始体现
– 激光能直接探测到障碍物,视觉不能
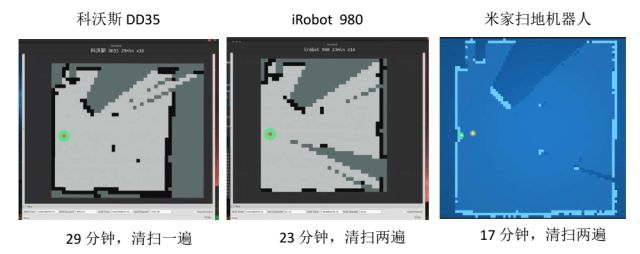
评测结果—较复杂场景
• 场景中有较多障碍时,激光的优势明显
为什么要做扫地机?
• 现存市场大
– 2017年国内扫地机器人零售总额约50亿
– 2017年科沃斯销售28亿
• 市场持续快速增长
– 目前美国市场渗透率16%
– 中国沿海大城市渗透率4%, 内地0.5%
– 国内扫地机销售总额年增幅30+% (预计2022年总额200亿)
– 科沃斯扫地机单品毛利率45% (小米手机为5%)
为什么360有机会?
• 现有主流产品有明显劣势
– 绝大多数产品采用 ESLAM (轮速记+IMU)
– 激光方案极大提升用户体验
• 市场颠覆正在发生
– 科沃斯品牌优势不明显
– 国外品牌iRobot、 Dyson售价太高(¥8000+)
– 小米发展迅速,两年后占约10%市场份额
• 2016年9月刚发布第一代产品, 9个月后,京东1.7万评论,好评率100%
我们于2017年1月发布第一代产品, 2.5个月后,天猫0.7万评论,好评率99.5%
和小米的比较优势



• 都采用激光SLAM的规划式,高效率、无漏扫
• 360 S6采用扫拖一体设计提升新用户购买意愿
– 首次购买扫地机的用户中,选扫拖一体的多10%
– 小米二代扫地机采用同样的扫拖一体设计
• 360 S6可以软件指定禁区
– 独家功能,用户集中好评
• 性价比显著优于小米
– 功能与小米二代扫地机相同,价格1699 vs 2499
本文总结了扫地机的几种方案,综合以上分析来看,目前单线激光方案LSLAM占优势,360的扫地机器人就是采用此种方案,在清扫效果与用户体验上都有很好的成绩。
HULK一线技术杂谈
由360云平台团队打造的技术分享公众号,内容涉及云计算、数据库、大数据、监控、泛前端、自动化测试等众多技术领域,通过夯实的技术积累和丰富的一线实战经验,为你带来最有料的技术分享

版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态