五: uart_add_one_port()操作本文引用地址:http://www.eepw.com.cn/article/201610/305916.htm
在前面提到。在對uart設備文件過程中。會將操作轉換到對應的port上,這個port跟uart_driver是怎么關聯起來的呢?這就是uart_add_ont_port()的主要工作了。
顧名思義,這個函數是在uart_driver增加一個port.代碼如下:
int uart_add_one_port(struct uart_driver *drv, struct uart_port *port)
{
struct uart_state *state;
int ret = 0;
struct device *tty_dev;
BUG_ON(in_interrupt());
if (port->line >= drv->nr)
return -EINVAL;
state = drv->state + port->line;
mutex_lock(port_mutex);
mutex_lock(state->mutex);
if (state->port) {
ret = -EINVAL;
goto out;
}
state->port = port;
state->pm_state = -1;
port->cons = drv->cons;
port->info = state->info;
/*
* If this port is a console, then the spinlock is already
* initialised.
*/
if (!(uart_console(port) (port->cons->flags CON_ENABLED))) {
spin_lock_init(port->lock);
lockdep_set_class(port->lock, port_lock_key);
}
uart_configure_port(drv, state, port);
/*
* Register the port whether it's detected or not. This allows
* setserial to be used to alter this ports parameters.
*/
tty_dev = tty_register_device(drv->tty_driver, port->line, port->dev);
if (likely(!IS_ERR(tty_dev))) {
device_can_wakeup(tty_dev) = 1;
device_set_wakeup_enable(tty_dev, 0);
} else
printk(KERN_ERR Cannot register tty device on line %d\n,
port->line);
/*
* Ensure UPF_DEAD is not set.
*/
port->flags = ~UPF_DEAD;
out:
mutex_unlock(state->mutex);
mutex_unlock(port_mutex);
return ret;
}
首先這個函數不能在中斷環境中使用。 Uart_port->line就是對uart設備文件序號。它對應的也就是uart_driver->state數組中的uart_port->line項。
它主要初始化對應uart_driver->state項。接著調用uart_configure_port()進行port的自動配置。然后注冊tty_device.如果用戶空間運行了udev或者已經配置好了hotplug.就會在/dev下自動生成設備文件了。
操作流程圖如下所示: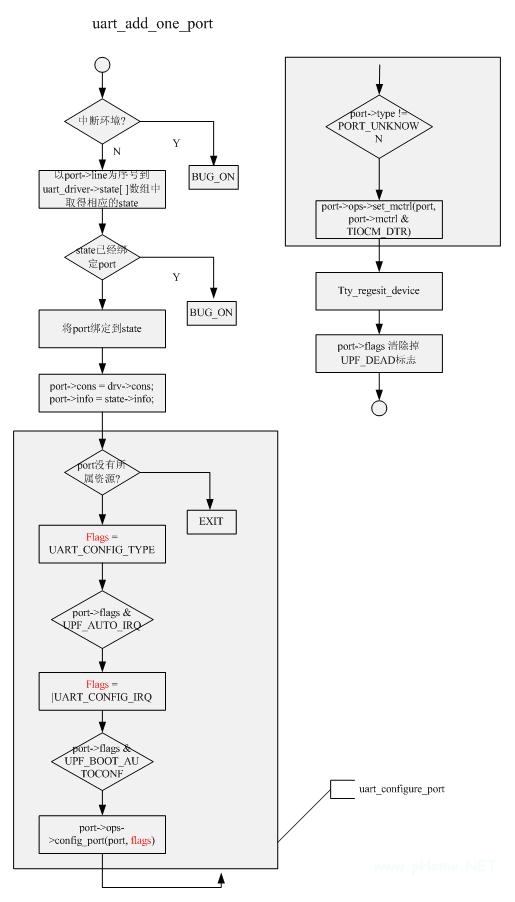
六:設備節點的open操作
在用戶空間執行open操作的時候,就會執行uart_ops->open. Uart_ops的定義如下:
static const struct tty_operations uart_ops = {
.open = uart_open,
.close = uart_close,
.write = uart_write,
.put_char = uart_put_char,
.flush_chars = uart_flush_chars,
.write_room = uart_write_room,
.chars_in_buffer= uart_chars_in_buffer,
.flush_buffer = uart_flush_buffer,
.ioctl = uart_ioctl,
.throttle = uart_throttle,
.unthrottle = uart_unthrottle,
.send_xchar = uart_send_xchar,
.set_termios = uart_set_termios,
.stop = uart_stop,
.start = uart_start,
.hangup = uart_hangup,
.break_ctl = uart_break_ctl,
.wait_until_sent= uart_wait_until_sent,
#ifdef CONFIG_PROC_FS
.read_proc = uart_read_proc,
#endif
.tiocmget = uart_tiocmget,
.tiocmset = uart_tiocmset,
};
對應open的操作接口為uart_open.代碼如下:
static int uart_open(struct tty_struct *tty, struct file *filp)
{
struct uart_driver *drv = (struct uart_driver *)tty->driver->driver_state;
struct uart_state *state;
int retval, line = tty->index;
BUG_ON(!kernel_locked());
pr_debug(uart_open(%d) called\n, line);
/*
* tty->driver->num won't change, so we won't fail here with
* tty->driver_data set to something non-NULL (and therefore
* we won't get caught by uart_close())。
*/
retval = -ENODEV;
if (line >= tty->driver->num)
goto fail;
/*
* We take the semaphore inside uart_get to guarantee that we won't
* be re-entered while allocating the info structure, or while we
* request any IRQs that the driver may need. This also has the nice
* side-effect that it delays the action of uart_hangup, so we can
* guarantee that info->tty will always contain something reasonable.
*/
state = uart_get(drv, line);
if (IS_ERR(state)) {
retval = PTR_ERR(state);
goto fail;
}
/*
* Once we set tty->driver_data here, we are guaranteed that
* uart_close() will decrement the driver module use count.
* Any failures from here onwards should not touch the count.
*/
tty->driver_data = state;
tty->low_latency = (state->port->flags UPF_LOW_LATENCY) ? 1 : 0;
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态