作者:張丹紅,陳文文,張華軍,蘇義鑫
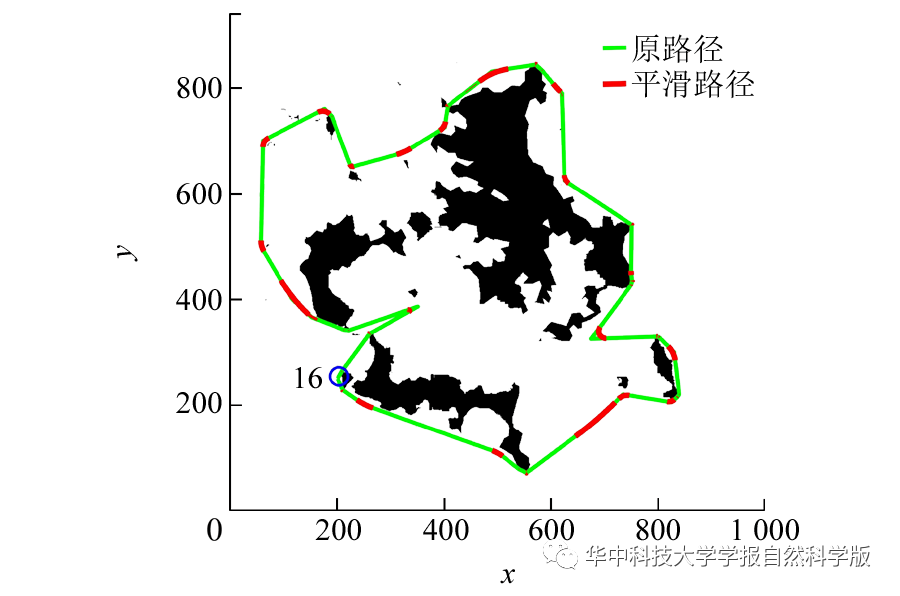
摘要:針對無人艇海上巡邏路徑規劃問題,提出了一種A*算法與蟻群算法相結合進行最短巡邏路徑優化的方法.在傳統A*算法的八角度搜索基礎上,設計了一種多角度A*算法以獲得更短的兩點之間可行路徑,并以A*算法搜索結果構建任意兩個巡邏點之間的最短路徑網絡.結合最短路徑網絡建立多點巡邏路徑規劃問題的目標函數,利用蟻群算法進行求解以獲得全局最優的巡邏路徑.針對巡邏路徑轉折角較大的問題,提出了一種平滑算法以獲得更符合實際航行需求的平滑路徑.仿真結果表明:該方法有效地去除了冗余節點,縮短了路徑長度,提高了路徑平滑度,規劃出了一條更優的無人艇巡邏路徑.
蟻群算法是一種自組織的算法、關鍵詞:無人艇;路徑規劃;A*算法;蟻群算法;平滑算法
文獻來源:張丹紅,陳文文,張華軍,蘇義鑫.A*算法與蟻群算法相結合的無人艇巡邏路徑規劃[J].華中科技大學學報(自然科學版),2020,48(6):13-18
DOI:10.13245/j.hust.200603
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态