首页
语法
变量
函数
技术动态
基础知识库
首页
/
那智机器人原点设定
ros机器人导航设置原点,目标点
之前利用movebase导航定位都是通过rviz用鼠标指来指去,实验时非常方便,但实际应用总不能也人工指来指去吧,这怎么体现智能呢 启动导航后,用以前使用的rviz设设置目标点来获取map坐标系下的位置坐标 使用 2d Nav Goal 指你想要的家坐标 查看rviz终
时间:2023-09-05 | 阅读:240
阅读排行
2683℃
1
如何防止应用程序泄密?
2497℃
2
linux中MySQL密码的恢复方...
2477℃
3
AlertDialog禁止返回键
2331℃
4
node.js当中net模块的简单...
2185℃
5
我的高质量软件发布心得
2115℃
6
从源码角度看Spark on yar...
1973℃
7
在linux云服务器上运行Jar...
1517℃
8
codevs1521 华丽的吊灯
猜你喜欢
相框
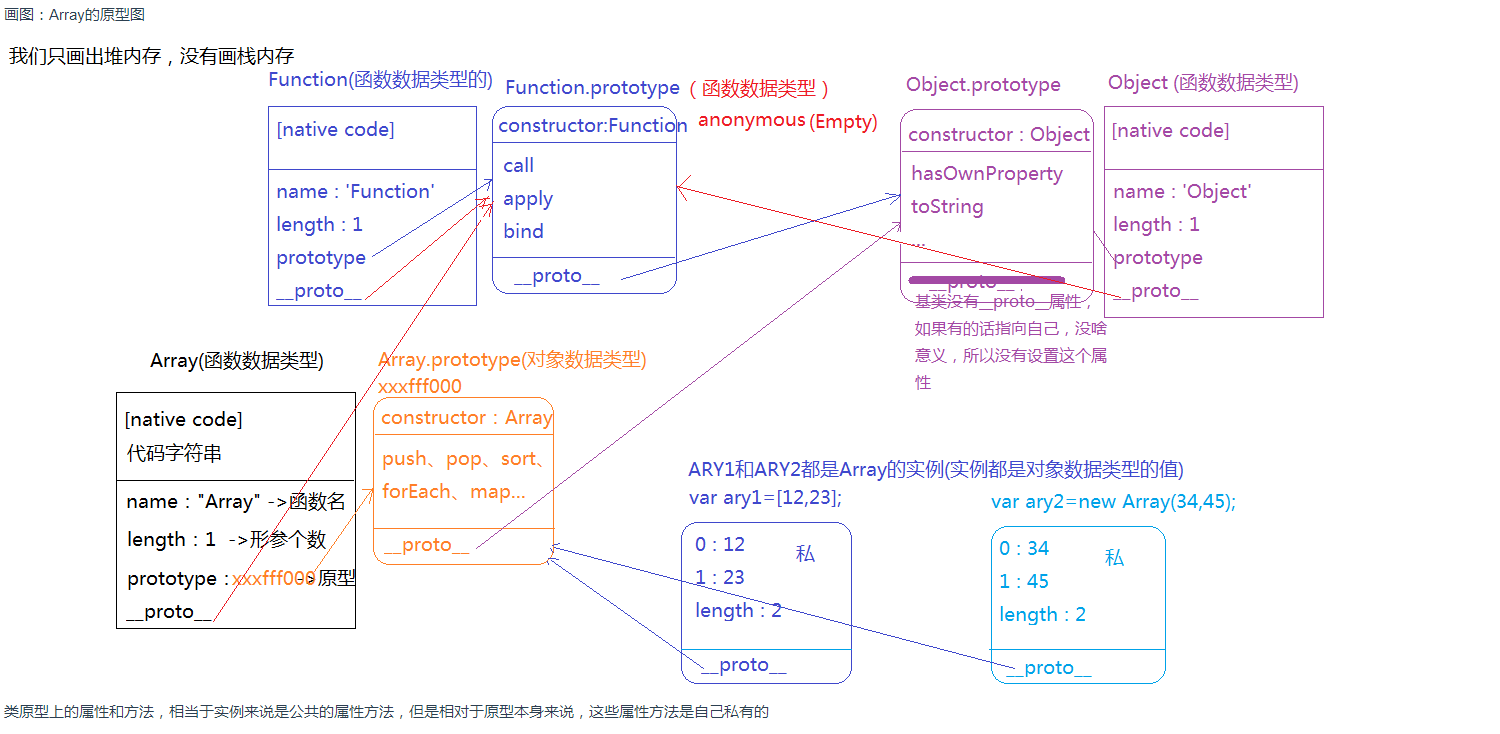
JS面向对象程序设计(OOP:Object Oriented Programming)
svn添加到windows服务中
BZOJ 1032 JSOI 2007 祖码Zuma 区间DP
华为成功完成中国联通NFV三层解耦测试验证
iOS 关于真机和模拟器framework合并
谈谈如何构建技术部门的知识库
回顾一下Unix哲学
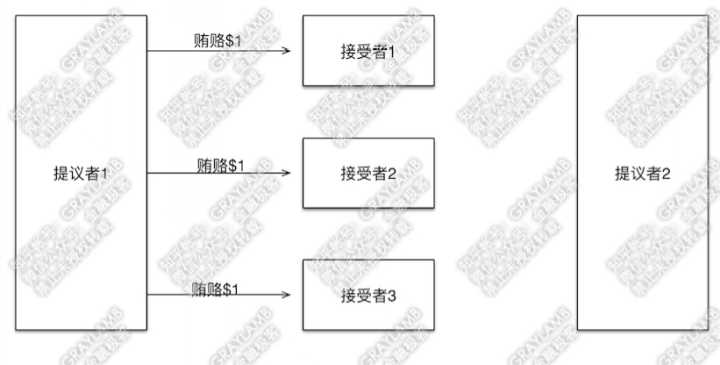
分布式系统一致性协议--Paxos算法
2、压滤机现场图片和组成部分详细构造
如何使用Docker安装Redis\Zookeeper\Mysql
2016上半年中国云存储排行榜:阿里云居榜首
热门标签
python3
Spring boot
python有什么用
python和java
java
Springboot教程
python编程
Leetcode
python爬蟲教程
python菜鳥教程
Springboot注解
Mybatis
Springboot框架
Springboot
UNIXLINUX
SpringBootApplication
python为什么叫爬虫
qpython
我要关灯
我要开灯
客户电话
工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
官方微信
扫码二维码
获取最新动态
返回顶部