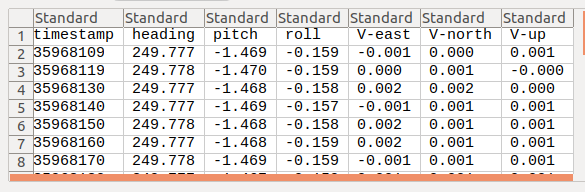
項目需要將所給的csv表格中IMU數據讀取并轉化為sensor_msgs/Imu格式,以便于后續使用數據跑定位算法。
ifstream inFile("(csv文件絕對路徑)", ios::in); //
vector<string> stamp,Yaw,Pitch,Roll,Ve,Vn,Vu;if (!inFile)
{cout << "打開CSV文件失敗!" << endl;exit(1);
}
string line;
while (getline(inFile, line)){string field;istringstream sin(line);getline(sin, field, ',');stamp.push_back(field.c_str()); getline(sin, field, ',');Yaw.push_back(field.c_str()); getline(sin, field, ',');Pitch.push_back(field.c_str()); getline(sin, field, ',');Roll.push_back(field.c_str()); getline(sin, field, ',');Ve.push_back(field.c_str()); getline(sin, field, ',');Vn.push_back(field.c_str()); getline(sin, field); Vu.push_back(field.c_str());
}
由于csv中所給的數據并不是標準IMU格式,而是通過解算得到的處理過后的數據,所以需要通過逆變換反推出IMU的標準數據,得到gyro,accel,四元數等數據。
qB=[cos?(ψ/2)00sin?(ψ/2)][cos?(θ/2)0sin?(θ/2)0][cos?(?/2)sin?(?/2)00]=[cos?(?/2)cos?(θ/2)cos?(ψ/2)+sin?(?/2)sin?(θ/2)sin?(ψ/2)sin?(?/2)cos?(θ/2)cos?(ψ/2)?cos?(?/2)sin?(θ/2)sin?(ψ/2)cos?(?/2)sin?(θ/2)cos?(ψ/2)+sin?(?/2)cos?(θ/2)sin?(ψ/2)cos?(?/2)cos?(θ/2)sin?(ψ/2)?sin?(?/2)sin?(θ/2)cos?(ψ/2)]\begin{aligned} \mathbf{q}_{\mathrm{B}} &=\left[\begin{array}{c} \cos (\psi / 2) \\ 0 \\ 0 \\ \sin (\psi / 2) \end{array}\right]\left[\begin{array}{c} \cos (\theta / 2) \\ 0 \\ \sin (\theta / 2) \\ 0 \end{array}\right]\left[\begin{array}{c} \cos (\phi / 2) \\ \sin (\phi / 2) \\ 0 \\ 0 \end{array}\right] \\ &=\left[\begin{array}{l} \cos (\phi / 2) \cos (\theta / 2) \cos (\psi / 2)+\sin (\phi / 2) \sin (\theta / 2) \sin (\psi / 2) \\ \sin (\phi / 2) \cos (\theta / 2) \cos (\psi / 2)-\cos (\phi / 2) \sin (\theta / 2) \sin (\psi / 2) \\ \cos (\phi / 2) \sin (\theta / 2) \cos (\psi / 2)+\sin (\phi / 2) \cos (\theta / 2) \sin (\psi / 2) \\ \cos (\phi / 2) \cos (\theta / 2) \sin (\psi / 2)-\sin (\phi / 2) \sin (\theta / 2) \cos (\psi / 2) \end{array}\right] \end{aligned} qB??=?????cos(ψ/2)00sin(ψ/2)???????????cos(θ/2)0sin(θ/2)0???????????cos(?/2)sin(?/2)00??????=?????cos(?/2)cos(θ/2)cos(ψ/2)+sin(?/2)sin(θ/2)sin(ψ/2)sin(?/2)cos(θ/2)cos(ψ/2)?cos(?/2)sin(θ/2)sin(ψ/2)cos(?/2)sin(θ/2)cos(ψ/2)+sin(?/2)cos(θ/2)sin(ψ/2)cos(?/2)cos(θ/2)sin(ψ/2)?sin(?/2)sin(θ/2)cos(ψ/2)???????
q0 = sin(roll/360.0f*M_PI) * cos(pitch/360.0f*M_PI) * cos(yaw/360.0f*M_PI) - cos(roll/360.0f*M_PI) * sin(pitch/360.0f*M_PI) * sin(yaw/360.0f*M_PI);
q1 = cos(roll/360.0f*M_PI) * sin(pitch/360.0f*M_PI) * cos(yaw/360.0f*M_PI) + sin(roll/360.0f*M_PI) * cos(pitch/360.0f*M_PI) * sin(yaw/360.0f*M_PI);
q2 = cos(roll/360.0f*M_PI) * cos(pitch/360.0f*M_PI) * sin(yaw/360.0f*M_PI) - sin(roll/360.0f*M_PI) * sin(pitch/360.0f*M_PI) * cos(yaw/360.0f*M_PI);
q3 = cos(roll/360.0f*M_PI) * cos(pitch/360.0f*M_PI) * cos(yaw/360.0f*M_PI) + sin(roll/360.0f*M_PI) * sin(pitch/360.0f*M_PI) * sin(yaw/360.0f*M_PI);
[gxgygz]=Mx?My?[00dydt]+Mx?[0dpdt0]+[drdt00]\left[\begin{array}{l} g_{x} \\ g_{y} \\ g_{z} \end{array}\right]=\mathrm{M}_{x} \cdot \mathrm{M}_{y} \cdot\left[\begin{array}{c} 0 \\ 0 \\ \frac{d y}{d t} \end{array}\right]+\mathrm{M}_{x} \cdot\left[\begin{array}{c} 0 \\ \frac{d p}{d t} \\ 0 \end{array}\right]+\left[\begin{array}{c} \frac{d r}{d t} \\ 0 \\ 0 \end{array}\right] ???gx?gy?gz?????=Mx??My?????00dtdy?????+Mx?????0dtdp?0????+???dtdr?00????
shell處理csv文件。=[1000cos?rsin?r0?sin?rcos?r]?[cos?p0?sin?p010sin?p0cos?p]?[00dydt]+[1000cos?rsin?r0?sin?rcos?r]?[0dpdt0]+[drdt00]=\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos r & \sin r \\ 0 & -\sin r & \cos r \end{array}\right] \cdot\left[\begin{array}{ccc} \cos p & 0 & -\sin p \\ 0 & 1 & 0 \\ \sin p & 0 & \cos p \end{array}\right] \cdot\left[\begin{array}{c} 0 \\ 0 \\ \frac{d y}{d t} \end{array}\right]+\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos r & \sin r \\ 0 & -\sin r & \cos r \end{array}\right] \cdot\left[\begin{array}{c} 0 \\ \frac{d p}{d t} \\ 0 \end{array}\right]+\left[\begin{array}{c} \frac{d r}{d t} \\ 0 \\ 0 \end{array}\right] =???100?0cosr?sinr?0sinrcosr????????cosp0sinp?010??sinp0cosp????????00dtdy?????+???100?0cosr?sinr?0sinrcosr????????0dtdp?0????+???dtdr?00????
=[10?sin?p0cos?rcos?p?sin?r0?sin?rcos?p?cos?r]?[drdtdpdtdydt]=\left[\begin{array}{ccc} 1 & 0 & -\sin p \\ 0 & \cos r & \cos p \cdot \sin r \\ 0 & -\sin r & \cos p \cdot \cos r \end{array}\right] \cdot\left[\begin{array}{l} \frac{d r}{d t} \\ \frac{d p}{d t} \\ \frac{d y}{d t} \end{array}\right] =???100?0cosr?sinr??sinpcosp?sinrcosp?cosr????????dtdr?dtdp?dtdy?????
Eigen::Vector3f deltaAngle;
Eigen::Vector3f gyro;
Eigen::Matrix3f tfmatrix;
yaw = atof(Yaw[i].c_str());
pitch = atof(Pitch[i].c_str());
roll = atof(Roll[i].c_str());
tfmatrix<<1,0,-sin(pitch/180.0f*M_PI),0,cos(roll/180.0f*M_PI),cos(pitch/180.0f*M_PI)*sin(roll/180.0f*M_PI),0,-sin(roll/180.0f*M_PI),cos(pitch/180.0f*M_PI)*cos(roll/180.0f*M_PI);
deltaAngle<<(roll-last_roll)/0.01f,(pitch-last_pitch)/0.01f,(yaw-last_yaw)/0.01f;
gyro=tfmatrix*deltaAngle;
[axayaz]=Mx?My?Mz?[dvndveg+dvu/dt]\left[\begin{array}{l} a_{x} \\ a_{y} \\ a_{z} \end{array}\right]=\mathrm{M}_{x} \cdot \mathrm{M}_{y} \cdot \mathrm{M}_{z} \cdot\left[\begin{array}{l} d vn \\ d ve \\ g+dvu/dt \end{array}\right] ???ax?ay?az?????=Mx??My??Mz?????dvndveg+dvu/dt????
=[1000cos?rsin?r0?sin?rcos?r]?[cos?p0?sin?p010sin?p0cos?p]?[cos?ysin?y0?sin?ycos?y0001]?[dvndveg+dvu/dt]=\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos r & \sin r \\ 0 & -\sin r & \cos r \end{array}\right] \cdot\left[\begin{array}{ccc} \cos p & 0 & -\sin p \\ 0 & 1 & 0 \\ \sin p & 0 & \cos p \end{array}\right] \cdot\left[\begin{array}{ccc} \cos y & \sin y & 0 \\ -\sin y & \cos y & 0 \\ 0 & 0 & 1 \end{array}\right] \cdot\left[\begin{array}{l} d vn \\ d ve \\ g+dvu/dt \end{array}\right] =???100?0cosr?sinr?0sinrcosr????????cosp0sinp?010??sinp0cosp????????cosy?siny0?sinycosy0?001????????dvndveg+dvu/dt????
=[cos?p?cos?ycos?p?sin?y?sin?pcos?y?sin?p?sin?r?cos?r?sin?ycos?r?cos?y+sin?p?sin?r?sin?ycos?p?sin?rsin?r?sin?y+cos?r?cos?y?sin?pcos?r?sin?p?sin?y?cos?y?sin?rcos?p?cos?r]?[dvndveg+dvu/dt]=\left[\begin{array}{ccc} \cos p \cdot \cos y & \cos p \cdot \sin y & -\sin p \\ \cos y \cdot \sin p \cdot \sin r-\cos r \cdot \sin y & \cos r \cdot \cos y+\sin p \cdot \sin r \cdot \sin y & \cos p \cdot \sin r \\ \sin r \cdot \sin y+\cos r \cdot \cos y \cdot \sin p & \cos r \cdot \sin p \cdot \sin y-\cos y \cdot \sin r & \cos p \cdot \cos r \end{array}\right] \cdot\left[\begin{array}{l} dvn \\ dve \\ g+dvu/dt \end{array}\right] =???cosp?cosycosy?sinp?sinr?cosr?sinysinr?siny+cosr?cosy?sinp?cosp?sinycosr?cosy+sinp?sinr?sinycosr?sinp?siny?cosy?sinr??sinpcosp?sinrcosp?cosr????????dvndveg+dvu/dt????
=[?sin?pcos?p?sin?rcos?p?cos?r]?[dvndveg+dvu/dt]=\left[\begin{array}{c} -\sin p \\ \cos p \cdot \sin r \\ \cos p \cdot \cos r \end{array}\right] \cdot\left[\begin{array}{l} d vn \\ d ve \\ g+dvu/dt \end{array}\right] =????sinpcosp?sinrcosp?cosr????????dvndveg+dvu/dt????
Eigen::Vector3f deltaV;
Eigen::Vector3f accel;
Eigen::Matrix3f tfmatrix2;
vx = atof(Vn[i].c_str());
vy = atof(Ve[i].c_str());
vz = atof(Vu[i].c_str());tfmatrix2<<cos(pitch/180.0f*M_PI)*cos(yaw/180.0f*M_PI),cos(pitch/180.0f*M_PI)*sin(yaw/180.0f*M_PI),-sin(pitch/180.0f*M_PI),cos(yaw/180.0f*M_PI)*sin(pitch/180.0f*M_PI)*sin(roll/180.0f*M_PI)- cos(roll/180.0f*M_PI)*sin(yaw/180.0f*M_PI),cos(roll/180.0f*M_PI)*cos(yaw/180.0f*M_PI)+sin(pitch/180.0f*M_PI)*sin(roll/180.0f*M_PI)*sin(yaw/180.0f*M_PI),cos(pitch/180.0f*M_PI)*sin(roll/180.0f*M_PI),sin(roll/180.0f*M_PI)*sin(yaw/180.0f*M_PI)+cos(roll/180.0f*M_PI)*cos(yaw/180.0f*M_PI)*sin(pitch/180.0f*M_PI),cos(roll/180.0f*M_PI)*sin(pitch/180.0f*M_PI)*sin(yaw/180.0f*M_PI)-cos(yaw/180.0f*M_PI)*sin(roll/180.0f*M_PI),cos(pitch/180.0f*M_PI)*cos(roll/180.0f*M_PI);
deltaV<<(vx-last_vx)/0.01f,(vy-last_vy)/0.01f,(vz-last_vz)/0.01f+9.8f;
accel=tfmatrix2*deltaV;
ros::init(argc, argv, "imu2rosbag");
ros::NodeHandle nh;
ros::Publisher IMU_pub = nh.advertise<sensor_msgs::Imu>("IMU_data", 20);
ros::Rate loop_rate(10);
sensor_msgs::Imu imu_data;
imu_data.header.frame_id = "base_link";
imu_data.header.stamp = ros::Time(atoi(stamp[i].c_str()));imu_data.orientation.x = q0;
imu_data.orientation.y = q1;
imu_data.orientation.z = q2;
imu_data.orientation.w = q3;imu_data.linear_acceleration.x = accel(0);
imu_data.linear_acceleration.y = accel(1);
imu_data.linear_acceleration.z = accel(2);imu_data.angular_velocity.x = gyro(0);
imu_data.angular_velocity.y = gyro(1);
imu_data.angular_velocity.z = gyro(2);
用python讀取csv文件,ref: https://blog.csdn.net/weixin_39719127/article/details/110299079 (姿態解算)
? https://blog.csdn.net/chenlin41204050/article/details/78429437 (C++讀CSV文件)
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态