在本节中,
在上一节中,我们看到了对极约束和其他相关术语等基本概念。我们还看到,如果我们有两个场景相同的图像,则可以通过直观的方式从中获取深度信息。下面是一张图片和一些简单的数学公式证明了这种想法。
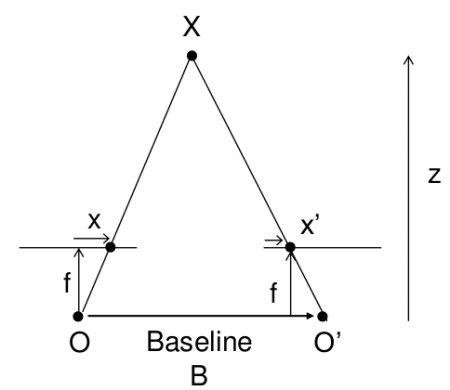
opencvcontrib。上图包含等效三角形。编写它们的等式将产生以下结果:
$$ disparity = x - x' = frac{Bf}{Z} $$
$x$和$x'$是图像平面中与场景点3D相对应的点与其相机中心之间的距离。$B$是两个摄像机之间的距离(我们知道),$f$是摄像机的焦距(已经知道)。简而言之,上述方程式表示场景中某个点的深度与相应图像点及其相机中心的距离差成反比。因此,利用此信息,我们可以得出图像中所有像素的深度。
opencv提取图像某区域。因此,它在两个图像之间找到了对应的匹配项。我们已经看到了Epiline约束如何使此操作更快,更准确。一旦找到匹配项,就会发现差异。让我们看看如何使用OpenCV做到这一点。
下面的代码片段显示了创建视差图的简单过程。
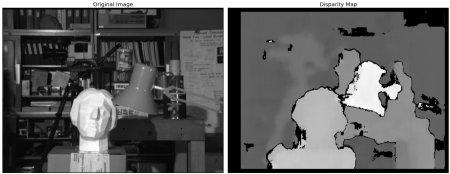
import numpy as npimport cv2 as cvfrom matplotlib import pyplot as pltimgL = cv.imread('tsukuba_l.png',0)imgR = cv.imread('tsukuba_r.png',0)stereo = cv.StereoBM_create(numDisparities=16, blockSize=15)disparity = stereo.compute(imgL,imgR)plt.imshow(disparity,'gray')plt.show()下面的图像包含原始图像(左)及其视差图(右)。如你所见,结果受到高度噪声的污染。通过调整numDisparities和blockSize的值,可以获得更好的结果。
opencv canny、当你熟悉StereoBM时,会有一些参数,可能需要微调参数以获得更好,更平滑的结果。参数:
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态