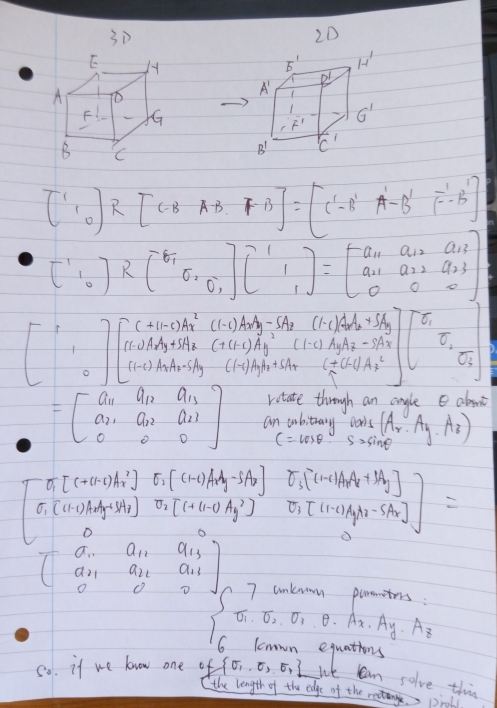
前天,楊老師出了一問題,將一3D立方體投影到2D平面上, 知道2D平面上所有點的坐標,能否恢復出3D立方體點的坐標
我的答案是:需要給定3D立方體中某一連長的長度才行
推導過程如下:
c++源碼如下:
#include "AntTweakBar.h"#include <stdlib.h>
#include <stdio.h>
#include <math.h>
#include <iostream>
#include <Eigen/Dense>
#include <Windows.h>#if defined(_WIN32) || defined(_WIN64)
// MiniGLUT.h is provided to avoid the need of having GLUT installed to
// recompile this example. Do not use it in your own programs, better
// install and use the actual GLUT library SDK.
//# define USE_MINI_GLUT
#endif#if defined(USE_MINI_GLUT)
# include "MiniGLUT.h"
#elif defined(_MACOSX)
# include <GLUT/glut.h>
#else
# include <GL/glut.h>
#endif#include "GLM.h"
#include "glm\glm.hpp"
#include "glm\gtc\matrix_transform.hpp"
#include "glm\gtc\type_ptr.hpp"// This example displays one of the following shapes// Shapes scale
float g_Zoom = 1.0f;
// Shape orientation (stored as a quaternion)
float g_Rotation[] = { 0.0f, 0.0f, 0.0f, 1.0f };
// Auto rotate
int g_AutoRotate = 0;
int g_RotateTime = 0;
float g_RotateStart[] = { 0.0f, 0.0f, 0.0f, 1.0f };
// Shapes material
float g_MatAmbient[] = { 0.5f, 0.0f, 0.0f, 1.0f };
float g_MatDiffuse[] = { 1.0f, 1.0f, 0.0f, 1.0f };
// Light parameter
float g_LightMultiplier = 1.0f;
float g_LightDirection[] = { -0.57735f, -0.57735f, -0.57735f };
// Axis parameterfloat g_AxisDirection[] = {0.0f, 1.0f, 0.0f};float g_cameraAngleX = 0.0f, g_cameraAngleY = 0.0f;
float g_mouseX = 0.0f, g_mouseY = 0.0f;
bool g_mouseLeftDown = false;float g_screenWidth=1024;
float g_screenHeight=768;glm::mat4 g_projection=glm::mat4(1);
glm::mat4 g_modelview=glm::mat4(1);
glm::mat4 g_world=glm::mat4(1);
glm::mat4 g_view=glm::mat4(1);
glm::mat4 g_mvp=glm::mat4(1);
glm::mat4 Rx = glm::mat4(1);
//float g_lastAngle = 0.0f;
float g_accuAngle = 0.0f;
float g_currentlyRotatedAngle = 0.0f;
Eigen::Matrix<float, 3, 24> g_3DCuboidPositionOriginal;
Eigen::Matrix<float, 3, 24> g_3DCuboidPositionCurrent;// Routine to set a quaternion from a rotation axis and angle
// ( input axis = float[3] angle = float output: quat = float[4] )
void SetQuaternionFromAxisAngle(const float *axis, float angle, float *quat)
{float sina2, norm;sina2 = (float)sin(0.5f * angle);norm = (float)sqrt(axis[0]*axis[0] + axis[1]*axis[1] + axis[2]*axis[2]);quat[0] = sina2 * axis[0] / norm;quat[1] = sina2 * axis[1] / norm;quat[2] = sina2 * axis[2] / norm;quat[3] = (float)cos(0.5f * angle);
}// Routine to convert a quaternion to a 4x4 matrix
// ( input: quat = float[4] output: mat = float[4*4] )
void ConvertQuaternionToMatrix(const float *quat, float *mat)
{float yy2 = 2.0f * quat[1] * quat[1];float xy2 = 2.0f * quat[0] * quat[1];float xz2 = 2.0f * quat[0] * quat[2];float yz2 = 2.0f * quat[1] * quat[2];float zz2 = 2.0f * quat[2] * quat[2];float wz2 = 2.0f * quat[3] * quat[2];float wy2 = 2.0f * quat[3] * quat[1];float wx2 = 2.0f * quat[3] * quat[0];float xx2 = 2.0f * quat[0] * quat[0];mat[0*4+0] = - yy2 - zz2 + 1.0f;mat[0*4+1] = xy2 + wz2;mat[0*4+2] = xz2 - wy2;mat[0*4+3] = 0;mat[1*4+0] = xy2 - wz2;mat[1*4+1] = - xx2 - zz2 + 1.0f;mat[1*4+2] = yz2 + wx2;mat[1*4+3] = 0;mat[2*4+0] = xz2 + wy2;mat[2*4+1] = yz2 - wx2;mat[2*4+2] = - xx2 - yy2 + 1.0f;mat[2*4+3] = 0;mat[3*4+0] = mat[3*4+1] = mat[3*4+2] = 0;mat[3*4+3] = 1;
}// Routine to multiply 2 quaternions (ie, compose rotations)
// ( input q1 = float[4] q2 = float[4] output: qout = float[4] )
void MultiplyQuaternions(const float *q1, const float *q2, float *qout)
{float qr[4];qr[0] = q1[3]*q2[0] + q1[0]*q2[3] + q1[1]*q2[2] - q1[2]*q2[1];qr[1] = q1[3]*q2[1] + q1[1]*q2[3] + q1[2]*q2[0] - q1[0]*q2[2];qr[2] = q1[3]*q2[2] + q1[2]*q2[3] + q1[0]*q2[1] - q1[1]*q2[0];qr[3] = q1[3]*q2[3] - (q1[0]*q2[0] + q1[1]*q2[1] + q1[2]*q2[2]);qout[0] = qr[0]; qout[1] = qr[1]; qout[2] = qr[2]; qout[3] = qr[3];
}// Return elapsed time in milliseconds
int GetTimeMs()
{
#if !defined(_WIN32)return glutGet(GLUT_ELAPSED_TIME);
#else// glutGet(GLUT_ELAPSED_TIME) seems buggy on Windowsreturn (int)GetTickCount();
#endif
}void Update3DCuboidPosition(float *mat)
{Eigen::Map<Eigen::Matrix<float, 4, 4>> mapMatrix(mat);//std::cout << mapMatrix << std::endl;g_3DCuboidPositionCurrent = mapMatrix.block<3,3>(0,0) * g_3DCuboidPositionOriginal;//std::cout << g_3DCuboidPositionCurrent << std::endl;
}void Draw2DCuboid()
{glBegin(GL_LINES);for(int i = 1; i < g_3DCuboidPositionCurrent.cols(); ++i){if( i % 4 != 0){glVertex3f(g_3DCuboidPositionCurrent.col(i - 1)(0), g_3DCuboidPositionCurrent.col(i - 1)(1), -10);glVertex3f(g_3DCuboidPositionCurrent.col(i)(0), g_3DCuboidPositionCurrent.col(i)(1), -10);}else{glVertex3f(g_3DCuboidPositionCurrent.col(i - 4)(0), g_3DCuboidPositionCurrent.col(i - 4)(1), -10);glVertex3f(g_3DCuboidPositionCurrent.col(i - 1)(0), g_3DCuboidPositionCurrent.col(i - 1)(1), -10);}}glEnd();
}void Output3DCuboidPosition()
{int order[8] = {0, 1, 2, 3, 4, 7, 6, 5};for(int i = 0; i < 8; ++i){std::cout << char( 'A' + order[i]) << "(3D) : " << g_3DCuboidPositionCurrent.col(i).transpose() << std::endl;}}void Output2DCuboidPosition()
{int order[8] = {0, 1, 2, 3, 4, 7, 6, 5};for(int i = 0; i < 8; ++i){std::cout << char( 'A' + order[i]) << "(2D) : " << g_3DCuboidPositionCurrent.col(i).head(2).transpose() << std::endl;}}void Draw3DCuboid()
{glBegin(GL_QUADS);for(int i = 0; i < g_3DCuboidPositionCurrent.cols(); ++i){if( i % 4 == 0){Eigen::Vector3f vec1 = g_3DCuboidPositionCurrent.col(i) - g_3DCuboidPositionCurrent.col(i + 1);Eigen::Vector3f vec2 = g_3DCuboidPositionCurrent.col(i + 2) - g_3DCuboidPositionCurrent.col(i + 1);Eigen::Vector3f nor = vec2.cross(vec1);glNormal3f(nor(0), nor(1), nor(2));}glVertex3f(g_3DCuboidPositionCurrent.col(i)(0), g_3DCuboidPositionCurrent.col(i)(1), g_3DCuboidPositionCurrent.col(i)(2));}glEnd();
}
void DrawLines()
{glDisable(GL_LIGHTING);glBegin(GL_LINES);glColor3f(1.0f, 0.0f, 0.0f);for(int i = 0; i < g_3DCuboidPositionCurrent.cols(); ++i){glVertex3f(g_3DCuboidPositionCurrent.col(i)(0), g_3DCuboidPositionCurrent.col(i)(1), g_3DCuboidPositionCurrent.col(i)(2));glVertex3f(g_3DCuboidPositionCurrent.col(i)(0), g_3DCuboidPositionCurrent.col(i)(1), -10);}glColor3f(1.0f, 1.0f, 1.0f);glEnd();glEnable(GL_LIGHTING);
}void SetMatrix();
// Callback function called by GLUT to render screen
void Display(void)
{float v[4]; // will be used to set light parametersfloat mat[4*4]; // rotation matrix// Clear frame bufferglClearColor(0, 0, 0, 1);glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);glEnable(GL_DEPTH_TEST);glDisable(GL_CULL_FACE);glEnable(GL_NORMALIZE);// Set lightglEnable(GL_LIGHTING);glEnable(GL_LIGHT0);v[0] = v[1] = v[2] = g_LightMultiplier*0.4f; v[3] = 1.0f;glLightfv(GL_LIGHT0, GL_AMBIENT, v);v[0] = v[1] = v[2] = g_LightMultiplier*0.8f; v[3] = 1.0f;glLightfv(GL_LIGHT0, GL_DIFFUSE, v);v[0] = -g_LightDirection[0]; v[1] = -g_LightDirection[1]; v[2] = -g_LightDirection[2]; v[3] = 0.0f;glLightfv(GL_LIGHT0, GL_POSITION, v);// Set materialglMaterialfv(GL_FRONT_AND_BACK, GL_AMBIENT, g_MatAmbient);glMaterialfv(GL_FRONT_AND_BACK, GL_DIFFUSE, g_MatDiffuse);// Set matrixSetMatrix();// Rotate and draw shapeglPushMatrix();//glTranslatef(0.5f, -0.3f, 0.0f);if( g_AutoRotate ) {
// float axis[3] = { 0, 1, 0 };g_currentlyRotatedAngle = (float)(GetTimeMs()-g_RotateTime)/1000.0f;
// float quat[4];
// SetQuaternionFromAxisAngle(axis, angle, quat);
// MultiplyQuaternions(g_RotateStart, quat, g_Rotation);Rx = glm::rotate(glm::mat4(1.0f), g_accuAngle + g_currentlyRotatedAngle, glm::make_vec3(g_AxisDirection));}else{Rx = glm::rotate(glm::mat4(1.0f), g_accuAngle, glm::make_vec3(g_AxisDirection));}Update3DCuboidPosition((float*)glm::value_ptr(Rx));//glMultMatrixf(mat);//glScalef(g_Zoom, g_Zoom, g_Zoom);Draw3DCuboid();if( g_AutoRotate )Output3DCuboidPosition();DrawLines();Draw2DCuboid();if( g_AutoRotate )Output2DCuboidPosition();//glCallList(1);glPopMatrix();glDisable(GL_LIGHTING);glCallList(2);glEnable(GL_LIGHTING);// Draw tweak barsTwDraw();// Present frame bufferglutSwapBuffers();// Recall Display at next frameglutPostRedisplay();
}
void TransToArray(GLdouble* trans,glm::mat4 mat) //GLM->GL
{for(int i=0;i<4;i++)for(int j=0;j<4;j++){int index=i*4+j;float temp=mat[i][j];trans[index]=mat[i][j];}
}void SetMatrix()
{g_projection = glm::perspective(45.0f, (float)g_screenWidth / g_screenHeight, 0.1f, 50.0f);//m_view=glm::lookAt(g_camerapos,g_camerapos+glm::vec3(0,0,-1),glm::vec3(0,1,0));glm::mat4 T = glm::translate(glm::mat4(1.0f),glm::vec3(0, 0, g_Zoom - 10));glm::mat4 Rx = glm::rotate(T, g_cameraAngleX, glm::vec3(1.0f, 0.0f, 0.0f));g_world = glm::rotate(Rx, g_cameraAngleY, glm::vec3(0.0f, 1.0f, 0.0f));g_world = glm::translate(glm::mat4(1.0f),glm::vec3(0, 0, cameraDistance-5));g_modelview=g_world;g_mvp = g_projection*g_world;glMatrixMode(GL_PROJECTION);glLoadIdentity();GLdouble tempmat[16];TransToArray(tempmat,g_mvp);glMultMatrixd(tempmat);glMatrixMode(GL_MODELVIEW);glLoadIdentity();
}// Callback function called by GLUT when window size changes
void Reshape(int width, int height)
{if ( width != 0 && height != 0){g_screenWidth = width;g_screenHeight = height;}SetMatrix();// Set OpenGL viewport and camera
// glViewport(0, 0, width, height);
// glMatrixMode(GL_PROJECTION);
// glLoadIdentity();
// gluPerspective(40, (double)width/height, 1, 100);
// glMatrixMode(GL_MODELVIEW);
// glLoadIdentity();
// gluLookAt(0,20,20, 0,0,0, 0,0,-1);
// glTranslatef(0, 0.6f, -1);// Send the new window size to AntTweakBarTwWindowSize(width, height);
}// Function called at exit
void Terminate(void)
{ glDeleteLists(1, 2);TwTerminate();
}// Callback function called when the 'AutoRotate' variable value of the tweak bar has changed
void TW_CALL SetAutoRotateCB(const void *value, void *clientData)
{(void)clientData; // unusedg_AutoRotate = *(const int *)value; // copy value to g_AutoRotateif( g_AutoRotate!=0 ) {// init rotationg_RotateTime = GetTimeMs();// make Rotation variable read-only//TwDefine(" TweakBar/ObjRotation readonly ");}else{g_accuAngle += g_currentlyRotatedAngle;// make Rotation variable read-write//TwDefine(" TweakBar/ObjRotation readwrite ");}
}// Callback function called by the tweak bar to get the 'AutoRotate' value
void TW_CALL GetAutoRotateCB(void *value, void *clientData)
{(void)clientData; // unused*(int *)value = g_AutoRotate; // copy g_AutoRotate to value}void InitCuboidPosition()
{g_3DCuboidPositionOriginal << -1.0f, -1.0f, 1.0f, 1.0f, -1.0f, 1.0f, 1.0f, -1.0f, -1.0f, -1.0f, -1.0f, -1.0f, 1.0f, 1.0f, 1.0f, 1.0f, -1.0f, 1.0f, 1.0f, -1.0f, -1.0f, -1.0f, 1.0f, 1.0f,2.0f, -2.0f, -2.0f, 2.0f, 2.0f, 2.0f, -2.0f, -2.0f, 2.0f, 2.0f, -2.0f, -2.0f, -2.0f, -2.0f, 2.0f, 2.0f, 2.0f, 2.0f, 2.0f, 2.0f , -2.0f, -2.0f, -2.0f, -2.0f,3.0f, 3.0f, 3.0f, 3.0f, -3.0f, -3.0f, -3.0f, -3.0f, 3.0f, -3.0f, -3.0f, 3.0f, 3.0f, -3.0f, -3.0f, 3.0f, 3.0f, 3.0f, -3.0f, -3.0f, 3.0f, -3.0f, -3.0f, 3.0f;//std::cout << g_3DCuboidPosition << std::endl;
}void MouseMotionCB(int x, int y)
{if (!TwEventMouseMotionGLUT(x, y)){g_cameraAngleY += (x - g_mouseX)/100;g_cameraAngleX += (y - g_mouseY)/100;g_mouseX = x;g_mouseY = y;}
}void MouseCB(int button, int state, int x, int y)
{g_mouseX = x;g_mouseY = y;if (!TwEventMouseButtonGLUT(button, state, x, y)){switch(state){case GLUT_DOWN:if (glutGetModifiers() == GLUT_LEFT_BUTTON){g_mouseLeftDown = true;}break;case GLUT_UP:if (glutGetModifiers() == GLUT_LEFT_BUTTON){g_mouseLeftDown = false;}break;}}
}// Main
int main(int argc, char *argv[])
{TwBar *bar; // Pointer to the tweak barfloat axis[] = { 0.0f, 1.0f, 0.0f }; // initial model rotationfloat angle = 0.0f;// Initialize cuboid points positionInitCuboidPosition();// Initialize GLUTglutInit(&argc, argv);glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGB | GLUT_DEPTH);glutInitWindowSize(g_screenWidth, g_screenHeight);glutCreateWindow("AntTweakBar simple example using GLUT");glutCreateMenu(NULL);// Set GLUT callbacksglutDisplayFunc(Display);glutReshapeFunc(Reshape);atexit(Terminate); // Called after glutMainLoop ends// Initialize AntTweakBarTwInit(TW_OPENGL, NULL);// Set GLUT event callbacks// - Directly redirect GLUT mouse button events to AntTweakBar//glutMouseFunc((GLUTmousebuttonfun)TwEventMouseButtonGLUT);// - Directly redirect GLUT mouse motion events to AntTweakBar//glutMotionFunc((GLUTmousemotionfun)TwEventMouseMotionGLUT);glutMouseFunc(MouseCB);glutMotionFunc(MouseMotionCB);// - Directly redirect GLUT mouse "passive" motion events to AntTweakBar (same as MouseMotion)glutPassiveMotionFunc((GLUTmousemotionfun)TwEventMouseMotionGLUT);// - Directly redirect GLUT key events to AntTweakBarglutKeyboardFunc((GLUTkeyboardfun)TwEventKeyboardGLUT);// - Directly redirect GLUT special key events to AntTweakBarglutSpecialFunc((GLUTspecialfun)TwEventSpecialGLUT);// - Send 'glutGetModifers' function pointer to AntTweakBar;// required because the GLUT key event functions do not report key modifiers states.TwGLUTModifiersFunc(glutGetModifiers);// Create some 3D objects (stored in display lists)glNewList(1, GL_COMPILE);glBegin(GL_QUADS);glNormal3d(0, 0, 1);//frontglVertex3f(-1.0f, 2.0f, 3.0f);//AglVertex3f(-1.0f, -2.0f, 3.0f);//BglVertex3f(1.0f, -2.0f, 3.0f);//CglVertex3f(1.0f, 2.0f, 3.0f);//DglNormal3d(0, 0, -1);//backglVertex3f(-1.0f, 2.0f, -3.0f);//EglVertex3f(1.0f, 2.0f, -3.0f);//HglVertex3f(1.0f, -2.0f, -3.0f);//GglVertex3f(-1.0f, -2.0f, -3.0f);//FglNormal3d(-1, 0, 0);//leftglVertex3f(-1.0f, 2.0f, 3.0f);//AglVertex3f(-1.0f, 2.0f, -3.0f);//EglVertex3f(-1.0f, -2.0f, -3.0f);//FglVertex3f(-1.0f, -2.0f, 3.0f);//BglNormal3d(1, 0, 0);//rightglVertex3f(1.0f, -2.0f, 3.0f);//CglVertex3f(1.0f, -2.0f, -3.0f);//GglVertex3f(1.0f, 2.0f, -3.0f);//HglVertex3f(1.0f, 2.0f, 3.0f);//DglNormal3d(0, 1, 0);//upglVertex3f(-1.0f, 2.0f, 3.0f);//AglVertex3f(1.0f, 2.0f, 3.0f);//DglVertex3f(1.0f, 2.0f, -3.0f);//HglVertex3f(-1.0f, 2.0f, -3.0f);//EglNormal3d(0, -1, 0);//downglVertex3f(-1.0f, -2.0f, 3.0f);//BglVertex3f(-1.0f, -2.0f, -3.0f);//FglVertex3f(1.0f, -2.0f, -3.0f);//GglVertex3f(1.0f, -2.0f, 3.0f);//CglEnd();glEndList();glNewList(2, GL_COMPILE);glBegin(GL_QUADS);glNormal3d(0, 0, 1);//frontglVertex3f(-5.0f, 5.0f, -10.0f);//AglVertex3f(-5.0f, -5.0f, -10.0f);//BglVertex3f(5.0f, -5.0f, -10.0f);//CglVertex3f(5.0f, 5.0f, -10.0f);//DglEnd();glEndList();// Create a tweak barbar = TwNewBar("TweakBar");TwDefine(" GLOBAL help='This example shows how to integrate AntTweakBar with GLUT and OpenGL.' "); // Message added to the help bar.TwDefine(" TweakBar size='200 400' color='96 216 224' "); // change default tweak bar size and color// Add 'g_Zoom' to 'bar': this is a modifable (RW) variable of type TW_TYPE_FLOAT. Its key shortcuts are [z] and [Z].TwAddVarRW(bar, "Zoom", TW_TYPE_FLOAT, &g_Zoom, " min=-30 max=30 step=0.01 keyIncr=z keyDecr=Z help='Scale the object (1=original size).' ");// // Add 'g_Rotation' to 'bar': this is a variable of type TW_TYPE_QUAT4F which defines the object's orientation
// TwAddVarRW(bar, "ObjRotation", TW_TYPE_QUAT4F, &g_Rotation,
// " label='Object rotation' opened=true help='Change the object orientation.' ");TwAddVarRW(bar, "AxisDir", TW_TYPE_DIR3F, &g_AxisDirection, " label='Axis direction' opened=true help='Change the Axis direction.' ");// Add callback to toggle auto-rotate mode (callback functions are defined above).TwAddVarCB(bar, "AutoRotate", TW_TYPE_BOOL32, SetAutoRotateCB, GetAutoRotateCB, NULL, " label='Auto-rotate' key=space help='Toggle auto-rotate mode.' ");// Add 'g_LightMultiplier' to 'bar': this is a variable of type TW_TYPE_FLOAT. Its key shortcuts are [+] and [-].TwAddVarRW(bar, "Multiplier", TW_TYPE_FLOAT, &g_LightMultiplier, " label='Light booster' min=0.1 max=4 step=0.02 keyIncr='+' keyDecr='-' help='Increase/decrease the light power.' ");// Add 'g_LightDirection' to 'bar': this is a variable of type TW_TYPE_DIR3F which defines the light directionTwAddVarRW(bar, "LightDir", TW_TYPE_DIR3F, &g_LightDirection, " label='Light direction' opened=true help='Change the light direction.' ");// Add 'g_MatAmbient' to 'bar': this is a variable of type TW_TYPE_COLOR3F (3 floats color, alpha is ignored)// and is inserted into a group named 'Material'.TwAddVarRW(bar, "Ambient", TW_TYPE_COLOR3F, &g_MatAmbient, " group='Material' ");// Add 'g_MatDiffuse' to 'bar': this is a variable of type TW_TYPE_COLOR3F (3 floats color, alpha is ignored)// and is inserted into group 'Material'.TwAddVarRW(bar, "Diffuse", TW_TYPE_COLOR3F, &g_MatDiffuse, " group='Material' ");// Store time8ioi88uiiiig_RotateTime = GetTimeMs();// Init rotationSetQuaternionFromAxisAngle(axis, angle, g_Rotation);SetQuaternionFromAxisAngle(axis, angle, g_RotateStart);// Call the GLUT main loopglutMainLoop();return 0;
}
function F = Cuboid_2DTo3D(x)
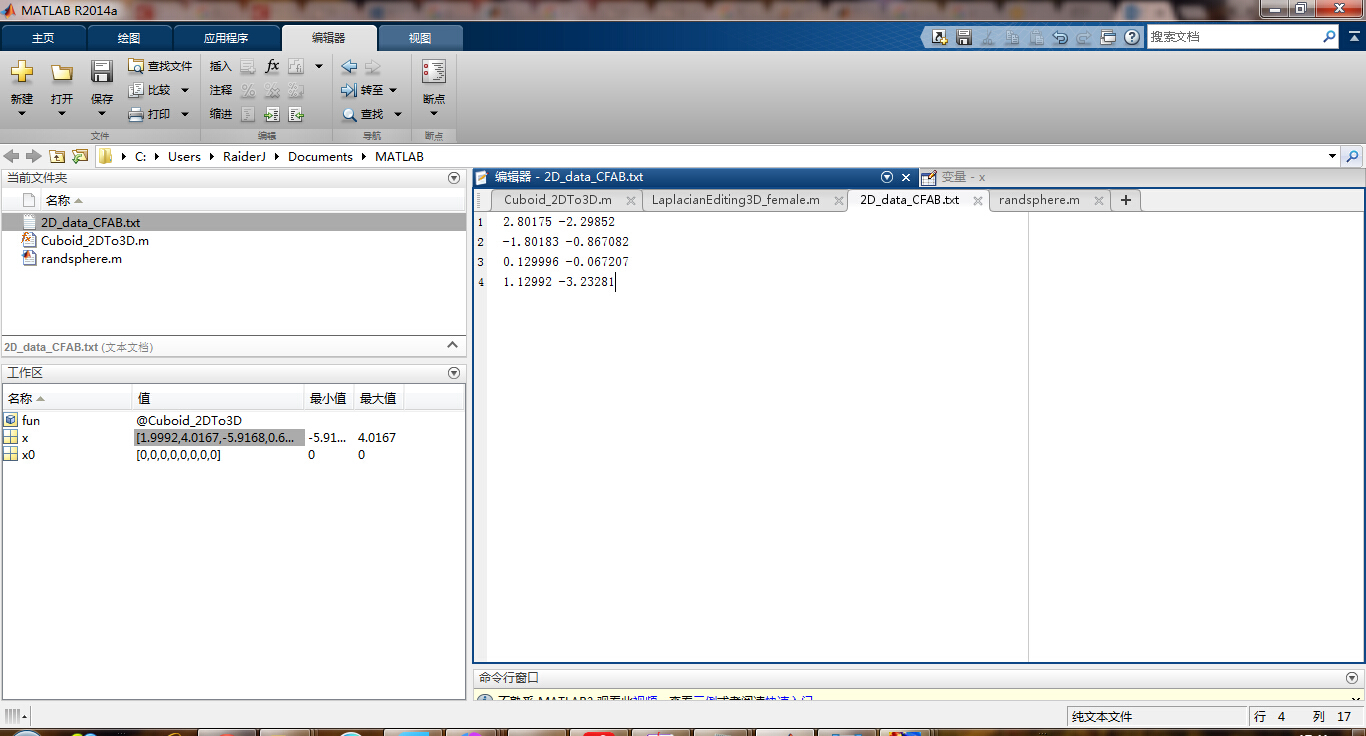
Data = load('2D_data_CFAB.txt');
C_Prime = Data(1,:);
F_Prime = Data(2,:);
A_Prime = Data(3,:);
B_Prime = Data(4,:);X_Prime = C_Prime - B_Prime;
Y_Prime = A_Prime - B_Prime;
Z_Prime = F_Prime - B_Prime;% 1 sigma_1
% 2 sigma_2
% 3 sigma_3
% 4 axix_x
% 5 axix_y
% 6 axix_z
% 7 cos_theta
% 8 sin_thetaF(1) = x(1) * ( x(7) + ( 1 - x(7)) * x(4)^2) - X_Prime(1,1);
F(2) = x(2) * ( (1 - x(7)) * x(4) * x(5) - x(8) * x(6)) - Y_Prime(1,1);
F(3) = x(3) * ( (1 - x(7)) * x(4) * x(5) + x(8) * x(5)) - Z_Prime(1,1);
F(4) = x(1) * ( ( 1 - x(7)) * x(4) * x(5) + x(8) * x(6)) - X_Prime(1,2);
F(5) = x(2) * ( x(7) + (1 - x(7)) * x(5)^2) - Y_Prime(1,2);
F(6) = x(3) * ( (1 - x(7)) * x(5) * x(6) - x(8) * x(4)) - Z_Prime(1,2);
F(7) = x(7)^2 + x(8)^2 - 1;
F(8) = x(1) - 2;
F(9) = x(4)^2 + x(5)^2 + x(6)^2 - 1;% usage:
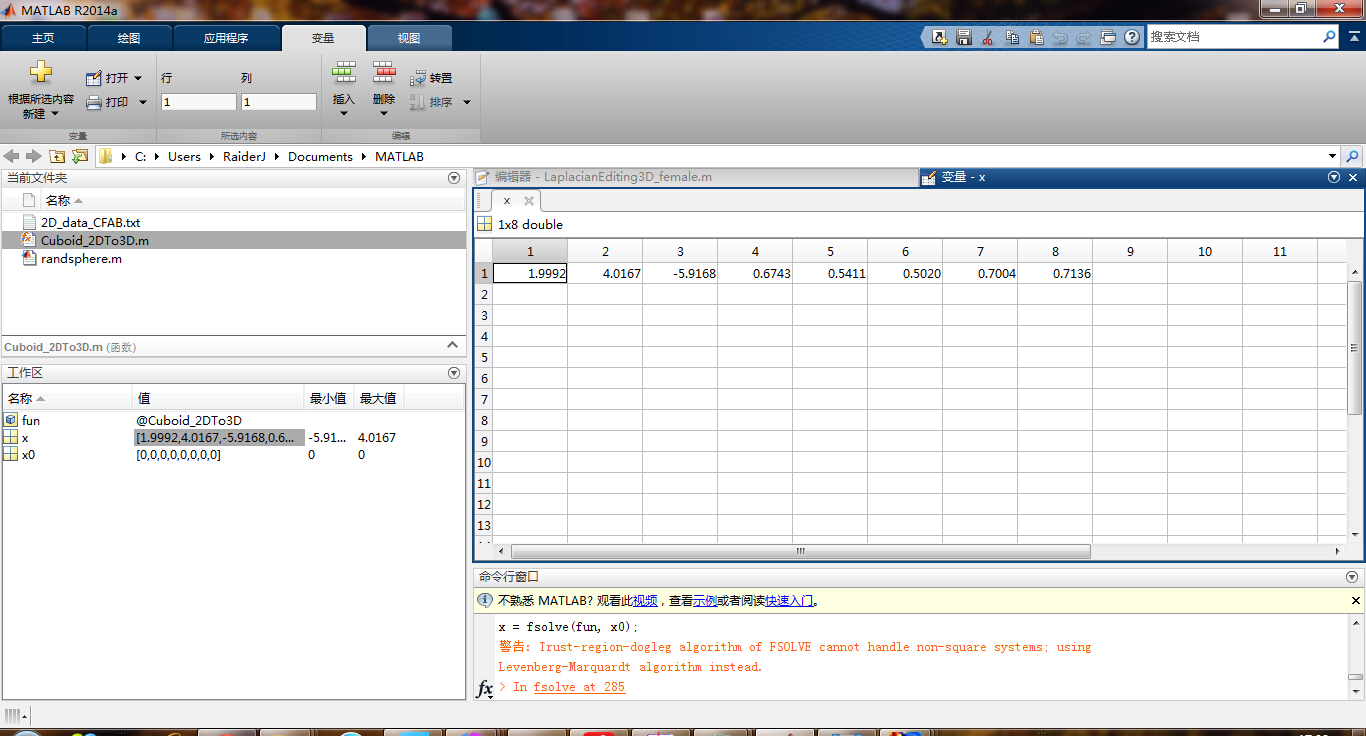
% fun = @Cuboid_2DTo3D;
% x0 =[0,0,0,0,0,0,0,0];
% x = fsolve(fun, x0);
2.80175 -2.29852
-1.80183 -0.867082
0.129996 -0.067207
1.12992 -3.23281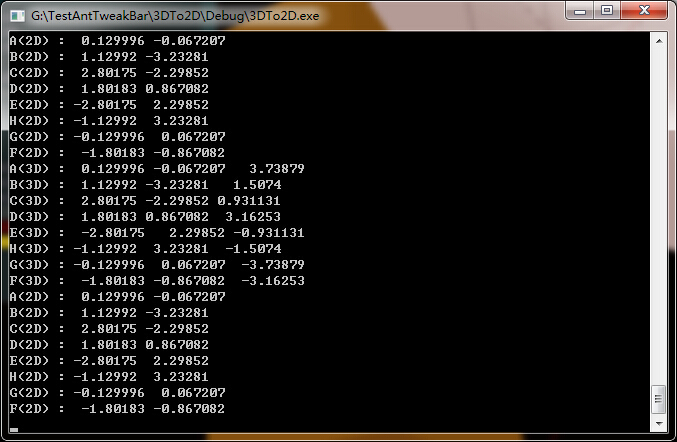
源代碼
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态